Push Button
A push button (tactile switch) is a momentary-contact switch that connects two pins when pressed and breaks the connection when released. It is the simplest digital input for an Arduino. The button requires a pull-up or pull-down resistor to hold the input at a known logic level when the button is open. The internal pull-up resistor (INPUT_PULLUP) is typically used — this inverts the logic (LOW = pressed). Debouncing in software eliminates false triggers from mechanical bounce.

For this interfacing you need the following components:
- Arduino board (Uno, Nano, Mega, etc.)
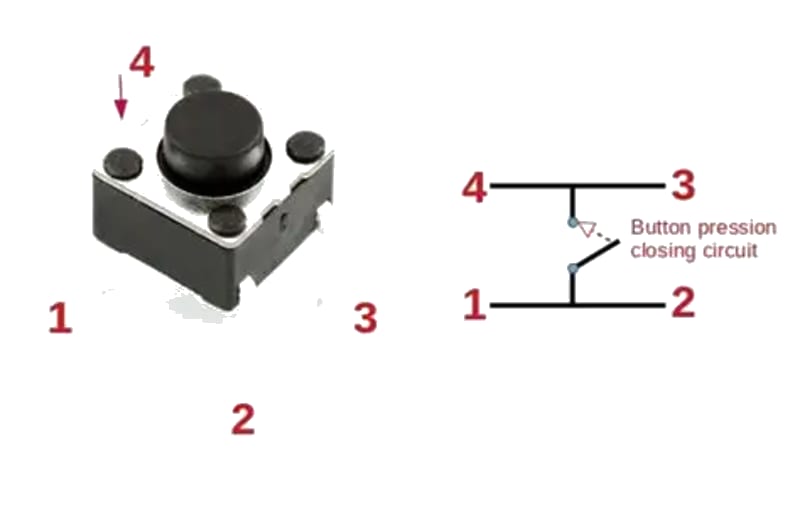
- Tactile push button switch (4-pin or 2-pin)
- Breadboard and jumper wires
- USB cable to connect Arduino to your computer
Schematic
Pull-up configuration (internal pull-up, inverted logic)
Arduino Push Button
------- -----------
Digital Pin 2 ----+----+
| |
/ \ |
/ \ |
| BTN |
\ /
\ /
|
GND ---------------+
When the button is pressed, Pin 2 reads LOW. When released, it reads HIGH (via internal pull-up).
Pull-down configuration (external resistor, positive logic)
5V ----+
/
\ 10 kΩ
/
|
+---- Digital Pin 2
|
|
/
\ Push Button
/
|
GND
When the button is pressed, Pin 2 reads HIGH. When released, it reads LOW (via pulldown to GND).
Pin Map
| Button Pin | Description | Arduino Connection |
|---|---|---|
| Terminal 1 | One side of switch | GND |
| Terminal 2 | Other side of switch | Digital Pin 2 (with INPUT_PULLUP) |
For 4-pin tactile switches, the pins are connected in pairs internally — any pin on one side bridges to any pin on the other side when pressed.
Install necessary Library
No library is required — the button is read with digitalRead(). For debouncing, the built-in millis() timing is sufficient. The Bounce2 library by Thomas O Fredericks provides a more robust debounce solution if needed:
arduino-cli lib install "Bounce2"
Code with complete explanation
This sketch demonstrates reading a push button with debouncing and detecting press, release, hold, and long-press events.
#define BUTTON_PIN 2
#define LED_PIN 13
unsigned long lastDebounceTime = 0;
unsigned long debounceDelay = 50; // ms
int lastButtonState = HIGH; // Previous reading (HIGH = not pressed with pull-up)
int buttonState = HIGH; // Current debounced state
unsigned long pressStartTime = 0;
bool isPressed = false;
void setup()
{
Serial.begin(9600);
pinMode(BUTTON_PIN, INPUT_PULLUP);
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, LOW);
}
void loop()
{
int reading = digitalRead(BUTTON_PIN);
// Debounce logic
if (reading != lastButtonState)
{
lastDebounceTime = millis();
}
if ((millis() - lastDebounceTime) > debounceDelay)
{
if (reading != buttonState)
{
buttonState = reading;
if (buttonState == LOW)
{
// Button pressed (LOW with pull-up)
Serial.println("Button PRESSED");
digitalWrite(LED_PIN, HIGH);
pressStartTime = millis();
isPressed = true;
}
else
{
// Button released
unsigned long holdDuration = millis() - pressStartTime;
Serial.print("Button RELEASED after ");
Serial.print(holdDuration);
Serial.println(" ms");
digitalWrite(LED_PIN, LOW);
isPressed = false;
}
}
}
// Long-press detection while held
if (isPressed && (millis() - pressStartTime > 2000))
{
Serial.println("Long press detected (> 2 seconds)");
// Reset timer to avoid repeated messages
pressStartTime = millis();
}
lastButtonState = reading;
}
Using the Bounce2 library
#include <Bounce2.h>
#define BUTTON_PIN 2
Bounce btn = Bounce();
void setup()
{
Serial.begin(9600);
btn.attach(BUTTON_PIN, INPUT_PULLUP);
btn.interval(50); // Debounce interval in ms
}
void loop()
{
btn.update();
if (btn.rose())
{
Serial.println("Button released");
}
if (btn.fell())
{
Serial.println("Button pressed");
}
if (btn.currentValue() == LOW)
{
// Button is currently held
}
}
Code breakdown
pinMode(BUTTON_PIN, INPUT_PULLUP)— enables the ATmega’s internal 20–50 kΩ pull-up resistor. The pin reads HIGH when open, LOW when connected to GND.- Debounce algorithm: the reading must remain stable for
debounceDelayms before being accepted as the new state. millis()— returns the number of milliseconds since the Arduino started. Used for non-blocking timing.isPressedflag tracks whether the button is currently held to enable long-press detection.digitalWrite(LED_PIN, HIGH)— turns on the built-in LED while the button is held.
Detecting multiple button states
| State | Condition | Use case |
|---|---|---|
| Pressed | state changed from HIGH → LOW | Trigger an action once |
| Released | state changed from LOW → HIGH | End of button interaction |
| Held | state is LOW for > N ms | Repeat actions |
| Double-click | two presses within a short window | Alternate mode |
Simple toggle (alternative)
bool ledState = false;
void loop()
{
if (btn.fell()) // Button pressed
{
ledState = !ledState;
digitalWrite(LED_PIN, ledState);
}
}
Steps to perform this interfacing
- Connect the push button between Arduino digital pin 2 and GND (pull-up configuration).
- No library installation needed.
- Copy the code into the Arduino IDE.
- Select the correct board and port (
Tools > BoardandTools > Port). - Upload the sketch to the Arduino.
- Open the Serial Monitor (
Tools > Serial Monitor, set baud rate to 9600). - Press and release the button — observe the press/release events and hold duration printed.
- Hold the button for > 2 seconds — observe the “Long press” message.
- The built-in LED (pin 13) turns on while the button is held.
Caution
- Internal pull-up range: The ATmega’s internal pull-up resistor is nominally 20 kΩ but varies from 20–50 kΩ between pins and across chips. This is adequate for a simple button but may cause unreliable readings with long wires (> 1 m) due to noise pickup. For long runs, use an external 10 kΩ pull-up resistor and disable
INPUT_PULLUP. - No pull-up / pull-down: Without a pull-up or pull-down resistor, the input pin floats when the button is open, picking up ambient electrical noise. The pin will randomly read HIGH or LOW, causing false triggers. Always use
INPUT_PULLUPor an external resistor. - Inverted logic with pull-up: When using
INPUT_PULLUP, LOW = pressed, HIGH = released. This is the opposite of what beginners often expect. If you need positive logic (HIGH = pressed), use an external pull-down resistor to GND and connect the button between 5V and the pin. - Mechanical bounce: A tactile switch physically bounces for 5–20 ms after contact, producing multiple rapid transitions. Without debouncing, a single press can register as dozens of presses. The debounce delay of 50 ms in the example is conservative — you can reduce it to 10–15 ms for faster response, or increase it to 100 ms for a very bouncy switch (some cheap buttons are worse).
- Schmitt trigger input: The ATmega’s digital inputs include a Schmitt trigger that provides hysteresis (≈ 300 mV). This helps with slow-rising signals but does not eliminate the need for debouncing on mechanical switches.
- 4-pin tactile switch orientation: Many tactile switches have 4 pins arranged in two pairs. The two pins on each side of the switch are electrically connected internally. Pins on opposite sides are connected only when pressed. Use a multimeter in continuity mode to verify the pinout if unsure.